《混合现实》知识整理
During ,I was involved in the Mix-Reality class guided by Hujun Bao.
The topic in this class is similar with computer vision. I’m really regretful because I didn’t listen to Mr. Bao’s class carefully, even though he explained the knowledge points carefully.
Mr. Bao sent me a book written by himself. I must read it when I’m free.
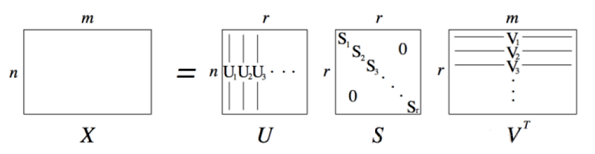
Singular Value decomposition(SVD)
- a factorization of a normal matrix, extended from eigendecomposition.
-
- singular values:
- One can easily verify that the square matrix also satisfies this definition(the same as eigendecomposition).
- are orthogonal matrices
- Usually we set to approximate SVD.
Transfomation in 2D
| Name | Function | Preserve | DOF |
|---|---|---|---|
| Isometries | rotation, translation | distance | |
| Similarities | [above], scale | ratio of lengths, angles | |
| Affinities | parallel lines, ratio of areas and lengths | ||
| Projective | cross ratio of 4 collinear points, collinearity |
-
Rotation+Scaling+Translation

-
Affinities

-
Projective

- find
- Due to projective transformation, they are in 3D Homogeneous Coordinates and .
- Rewrite parameters from in a column vector . For one pair of points, it can be derived that . Note that although there are equations, only of them are independent. So finally we can acquire that
- Use SVD to solve this equation: . is is the last column of .
- find
-
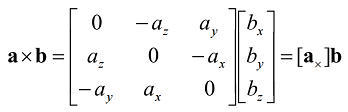
Cross in Matrix
Camera Model
-
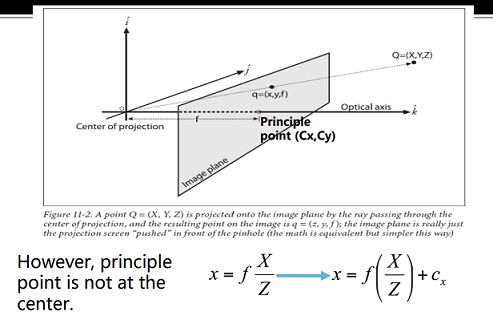
Pinhole camera
-
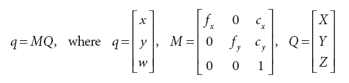
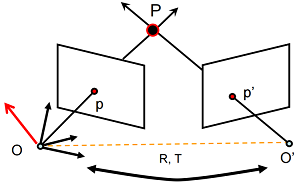
Because the point is not exactly at the center, we should add shift parameters and . So that .
-
Why the aperture cannot be too small?
- Less light passes through
- Diffraction effect
-
-
Lenses
-
For thin lense:

-
Camera Calibration
- intrinsic parameters
-
From Pinhole Camera Model, totally parameters. Use the trick of Homogeneous Coordinates, finally:
-
- extrinsic parameters
- rotation and translation
- parameters:
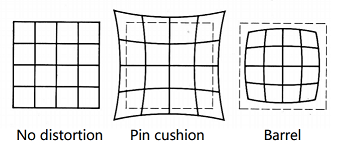
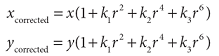
- distortion parameters
-
Radial distortion
 -
Tangential distortion
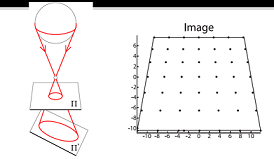
- parameters:
-
Camera Calibration
-
Without distortion, the transform matrices are as follows ( is the Skew parameter):

-
parameters number: . Need correspondences.
-
-
Homogeneous Linear Systems
- ,
- To find non-zero solution, Minimize under the constraint .
- A possible method: Direct Linear Transformation
- General method for Calibration Problem: Compute SVD decomposition of , the last column of V gives .
- Degenerate cases
- Points cannot lie on the same plane.
- Points cannot lie on the intersection curve of two quadric surfaces.
-
Taking Radial Distortion into Account
- nonlinear
- Methods
- Newton Method
- Levenberg-Marquardt Algorithm
- The latter doesn’t require the computation of .
Stereo-view Geometry
-
Sets of parallel lines on the same plane lead to collinear vanishing points.
-
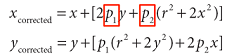
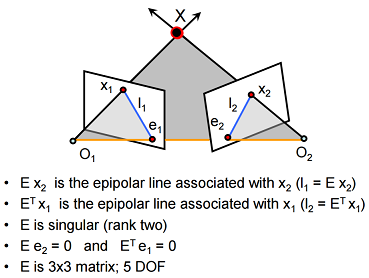
Epipolar Geometry 对极几何
-
Epipolar Constraint
-
Denote and .
-
Let , finally we get that , which is called Epipolar Constraint. It means that vector , and are coplanar.
-
Denote , then , is called Essential Matrix.
-
Properties about Essential Matrix
-
Write back (may different between cameras), is called Fundamental Matrix.

- Properties about Fundamental Matrix is similar to essential matrix. DOF.
-
-
Solve for Fundamental Matrix
- ( collects the parameters in ).
- If : exists unqiue .
- If : find calculated by SVD.
- Note that ’s rank is but may not. Second equation: and
- Normalization
- Transform one image first before calculating .
- Find a transform that: Origin (1) centroid of image points. (2) Mean square distance of the data points from origin is pixels.
- ( collects the parameters in ).
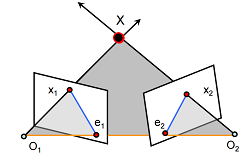
Stereo systems
-
Some applications
- Stereo vision: Estimate the position of given the observation of from two view points.
- Triangulation: Intersecting the two lines of sight gives rise to
-
Making image planes parallel
- Goal: Estimate the perspective transformation that makes the images parallel.
- To be continued…
-
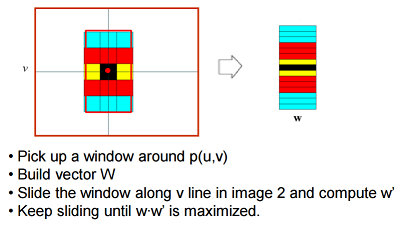
Correspondence problem
- Correlation Methods
- Smaller window
- More detail
- More noise
- Larger window
- Smoother disparity maps
- Less prone to noise
- To be continued…
- Correlation Methods
Image Processing
-
Filters
-
goals
- Extract useful information from the images
- Modify or enhance image properties
-
Gaussian Filters
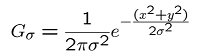
- Rule of thumb: set filter half-width to about
- Separable kernel; Convolution with self is another Gaussian
-
Median and Mean filter
-
-
Differentiation

-
Sub-sampling
- Problem: Aliasing
- Sampling Theorem (Nyquist): When sampling a signal at discrete intervals, the sampling frequency must be ( is frequency).
-
Edge Detection
- Edge: a location with high gradient
- Most widely used method: Canny Edge Detection
- Gaussian smoothing
- Derivative of Gaussian
- Find magnitude and orientation of gradient
- Extract edge points: “Non-maximum suppression”
- Linking and thresholding “Hysteresis”
-
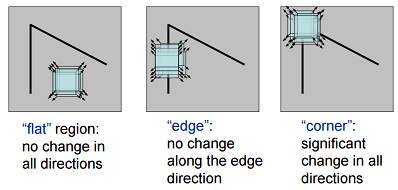
Harris Corner Detector
-
Denote . The corner has bigger .
-
Using bilinear approximation, we can derive that:

- : Corner
- : Edge
-
Set , use to judge corners ().

-
Property: Rotation invariance
-
Fitting
- Goal: Choose a parametric model to fit a certain quantity from data.
 wechat
wechat alipay
alipay